 |
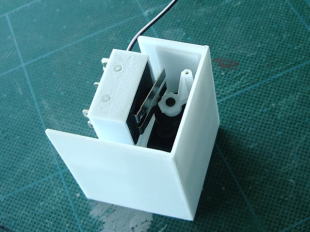
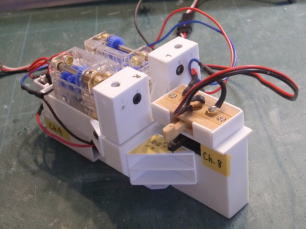
モーターの直列/並列接続を切り替えることで低速モードと高速モードとするためのスイッチ機構です。
写真のようにタミヤの5Aマイクロスイッチを2個、同時にON/OFFすることで構成しています。
今回からギミックのためのスイッチ機構はできるだけ全体をボックス状に覆ってしまうことにしました。
私の作るラジコンはギミックが多いため内部が配線だらけになってしまい、サーボの動作部分にケーブルを噛みこんで動作不良を起こすことが稀にあったため、それに対する改善策です。 |
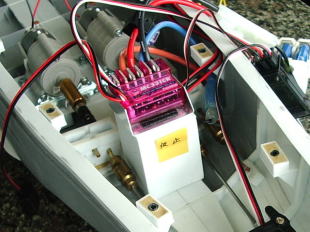 |
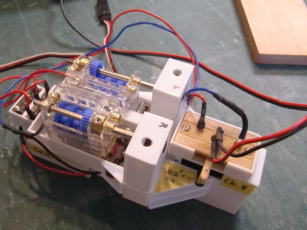
上の写真の変速機構をボックス状に格納した上にアンプを設置。全体を内側スクリューの間に固定しました。
(写真はまだ仮設置の状態です)
アンプ自体は甲板の高さを超えていますが、この位置は船首楼の一番後ろのあたりになるため、甲板より高いところまで使える構造になっています。
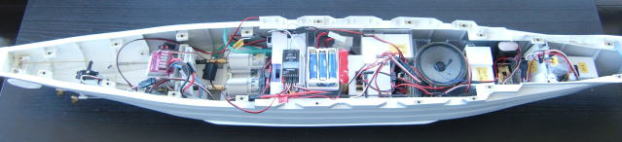
この状態で推進系の動作確認を実施。
減速ギアのおかげもあって最低回転数は36rpm。回転音も思ったより静かです。 |
 |
右舷と左舷を別モーターにした以上、必ず回転数のバラつきが発生します。そのため右舷モーターと左舷モーターの間に回転数を同期させる調速機構を設けています。
これが、モーターが2つあるのに最低回転数36rpmで綺麗にスクリューが回る理由です。
実艦の記録では、同型の比叡が舵が故障した時に左右のスクリューの回転を逆にして進路変更を図っていますが、これはラジコンなんでそんな器用な事は考えていませんので。 |
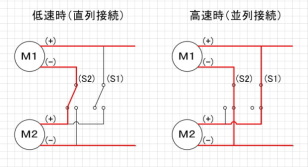 |
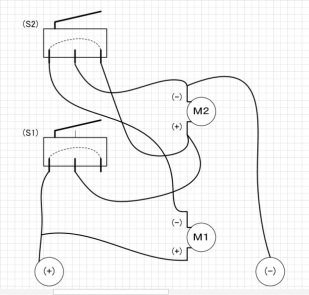
モーターの直列と並列を切り替えて速力を変更する回路を公開します。上がモーター周りの回路図で、下がタミヤの5Aマイクロスイッチを使った実際の結線イメージです。
回路図の例では電源は一つと仮定してモーターの直並列を切り替えていますが、モーターを電池に置き換えて逆に電池の直並列を切り替える応用もできます。
|
 |
実際にスクリュー等のようなものを駆動する場合はモーターの負荷はスクリュー軸の抵抗などで大きくことなってしまうため、2つのモーターの回転には差がつきやすく、回転数を揃えるための調速機構が必須になります。 |
|
|
 |
主砲の旋回用には減速ギアを使用していますが、電源を推進用の7.2Vと共用していますので旋回速度が速すぎます。
そこで電源と可逆スイッチの間に降圧用の安定化電源ユニットを入れ込みます。
この安定化電源ユニットは秋葉原で見つけた市販のもので、小型ながら写真上側のボリュームで出力電圧を調整できる優れ物。 |
 |
主砲の旋回機構は艦内に配置するのではなく、甲板にぶら下げた状態で設置することにしました。
この写真は2番砲塔の例ですが、固定方法は各主砲塔の周囲の状態によって異なります。
1基ずつ、どこをどうやって固定するか、旋回機構の形状と甲板下の取り付け位置、艦内の機器配置との干渉状況などを見ながら悩みます。 |
|
|
 |
左の写真は灯火類と汽笛用のサーボ機構です。
灯火類と汽笛のサーボは同一になっており、汽笛を鳴らす時は一旦、灯火類を消すことになります。
右側の回路が灯火類のスイッチ回路、左側の回路が汽笛用のスイッチとアンプのスイッチです.。
まだ、蓋をする前の状態。 |
 |
汽笛用のスピーカーは艦橋の基部下に設置しました。スピーカーの艦首方向の位置に灯火類と一緒になったスイッチ機構を設置、スピーカーの下には汽笛用の電子回路が設置してあります。
汽笛の音量を上げるためのアンプ回路は定格12Vでしたが、定格オーバー覚悟で、他電源とは別に9V電池を2個直列にして18Vを供給しています。
この電源は通常から外すことを想定せずに、本体を飾っている時も接続した状態でいいかと・・・ |
 |
汽笛音は甲板を設置した状態でも十分聞こえますが、屋外での航走時を考えるとできるだけ音量を上げておきたいところです。
そこで、汽笛音が少しでも船外に出るように穴を開口部を設けようと考えたのですが、模型としてのリアリティーはできるだけ壊したくありません。
そこで妥協点として2番主砲の基部に開口部を設けることにしました。ここであれば1番主砲の影になるのであまり目立たないかと。 |
|
|
 |
榛名製作のポイントの一つだった揚錨機構ですが、これも作っては見たもののなかなか上手く動きません。
最大のネックはサイズです。
ここまで小さくなると機構部の摩擦、錨鎖の自重などが計算外のパラメータになってしまい、錨を巻き上げると錨鎖が絡まったりしてしまいます。
左の写真は揚錨機構の4作目。
一番手前のスイッチ機構は錨の揚げ下ろし用の逆転スイッチ。その後ろのボックス内は錨鎖をクッション付きのドラムで挟み込んで巻上げるための機構でその下はチェーンハウスになっています。 |
 |
上から眺めた揚錨機構の外観。
送信機操作での左右揚錨機構の切り替えも、当初のクラッチ機構から電気回路に変更しています。
クラッチ機構の動作も感動ものでしたが、どうしても大きくなってしまいますので、手慣れた電気回路で駆動モーターを切り替える方式になりました。
ユニットの後ろ側、写真では左端にあるのが、そのための切り替えスイッチになります。サーボで逆さまにセットした3点スイッチをON/OFFすることで駆動する左右の揚錨機構を切り替えます。
電気回路的にはこの一次側(入力側)に正転/逆転の切り替えスイッチが入ります。 |
 |
錨鎖を確実に巻き上げて、降ろす時には錨鎖が絡まないようにするのってかなり難しい課題でした。
基本はタミヤのプーリーセットで出来ていますが、プーリーの溝にはビニールテープを巻くことでストッパーとし、小さいほうのプーリーを高反発性のスポンジで大きいほうのプーリーに押し付ける構造にしました。 |
|
|
 |
本体受信機の電源スイッチはこちら、飛行機用甲板の真下、4番主砲塔との間になります。
最終的にはカバーをして見えなくしてしまうつもりですが、一番後ろの甲板を外そうとするとこのスイッチも分解しないとダメ。
こういった事情より、後ろの甲板は基本的に外さないで使いたいと思っています。
もちろん、いざとなれば外せますけど。 |
 |
こちらはバッテリーユニットと配電ユニットです。
主電源は単4型1.2Vパナソニック製エネループ6本直列接続(7.2V)を2セット並列接続。合計12本の専用パックとなっています。
最初は単純に、重巡愛宕等に使っている6本直列接続の電池パックを2セット使う予定だったのですが、コネクタが鬱陶しかったので専用を作っちゃいました。
配電ユニットは主電源を推進器と他のギミックに振り分けるためのユニットで、推進系以外はミニ2Pコネクタを使って接続するためのメス口を4つ用意しました。
船体の重心調整はこのバッテリーユニットの電池位置を固定する仕切り板の位置を調整し、「ここだ!」ってところで固定します。 |
|
|
|
|