 |
艦内の装備品を全て載せ替えるため、まずは艦首部分と艦尾部分の甲板を超音波カッターでぶった切りました。
この時点でもはや後戻りはできません。
・・・こういった時は、かなり度胸がいります。 |
 |
無残に切り取られてしまった艦首部分。
超音波カッターは、早い話し、プラスチックを溶かしながら切っているようなもので、切断した部分はガベガベになってしまいます。
後はヤスリで整えますが、何もなかったのように甲板部分とピッチリくっつく訳にはいきませんので、はめ合わせの部分は消磁ケーブルで隠す方針です。 |
 |
上の写真同様に超音波カッターで切断した直後の艦尾部分のアップです。
もともと使用していたトイラジの操舵機構では、舵の操作角はコントロールできず、左右とも最大舵角と中立位置の3ポイントしか操作できませんでした。
最大舵角から中立位置への復帰はバネの張力で戻しており、左の写真ではその時の機構がそのまま残っています。
|
 |
舵の操舵機構は当たり前にサーボによる機構に変更しました。
なお、今回のリニューアル工事に伴い、艦内の全面にサーフェーサーを塗って漏水防止の目止めにしています。
と、いうのも元になっているプラモデルが船体上下分割になっており、その合わせ目の整合が悪かったためです。 |
 |
回頭性をあげるため舵も若干大きく作り直しました。
写真左が元のプラモデル状態の舵で、右が大型化して自作した舵です。 |
 |
モーターは元のマブチモーターからGraupner(ドイツ製)の7.2Vモーターへ換装。
サイズは元のマブチモーターと同じサイズなので、モータの固定は変更しないで済みました。 |
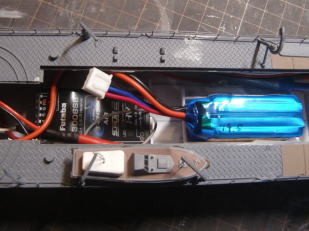 |
モーターの艦首側は受信機とバッテリーです。
バッテリーは6.6VのLi-Feバッテリーを使用。バッテリー電圧がやや低いせいでしょうか。連続してモーターを回すと、モーターがチンチンになっちゃいます。 |
 |
甲板の固定にはお得意のポリキャップ方式を採用。写真のような固定用ポリキャップを前甲板と後甲板に合わせて10か所ほど設置しました。 |


